.
"The Pentagon’s advanced research agency said on Wednesday that it will offer a prize of $2 million to the winners of a contest testing the performance of robots that could be used in emergencies like the Fukushima nuclear crisis in Japan."
Source: October 24 article on the NY Times Bits blog by John Markoff.
Friday, October 26, 2012
Friday, April 13, 2012
Communications and reconnaissance are key requirements for robot
"In the Tuesday announcement, the Defense Advanced Research and Planning Agency, or Darpa, lists eight likely tasks the robot will need to perform — among them driving a vehicle to a simulated disaster site, moving across rubble, removing rubble from an entryway, climbing a ladder, using a tool to break through a concrete wall, finding and closing a valve on a leaking pipe, and replacing a component like a cooling pump." New York Times.
If this list above is complete, then Darpa has left out some key requirements:
Communications
The first role of a robot in nuclear disasters is reconnaissance. Engineers trying to control the runaway reactors need to know what is going on, and what damage has occurred. Any attempts at repair can't proceed until the situation has been thoroughly analysed.
Even when the situation has been analysed and repairs decided, it's likely that the situation will unfold much like a space walk. When astronauts do repairs or construction outside the International Space Station, every step is rehearsed. Everything is followed by ground controllers in real time. All this requires high bandwidth. So reliable communications are key.
Yet in a disaster zone, communications will be difficult. Shards of metal, reflecting or absorbing radio waves, will be everywhere. Reactors have heavy shielding; the necessary repairs may even take place deep underground.
The most obvious solution is for the robot to carry and set up it's own communication relay stations. Hence compatibility with these stations must be a design requirement.
Reconnaissance
The robot will encounter many obstacles. Controllers will need the help of smaller robotic "scouts" to plan the route through rubble. Flying scouts would have obvious advantages, but crawlers would be useful in confined or dark locations. Some scouts would need to provide their own illumination. The information obtained by scouts needs to be integrated--at a control center--with plans for the buildings being scouted.
Recharging the robot's batteries
To be effective, the robot will have to operate power tools. It can carry more specialized tools if the robot supplies power to the tools. So the robot will use a lot of power. It will need to be able to change its main batteries by itself, while operating on backup batteries.
If access to a damaged reactor is difficult, the robot can't be running home every hour to recharge it's batteries. Once the repair task is identified, the robot will need to set up recharging stations, fed by generators or power cables, as close as possible to the area of repairs.
Specialized tools
Like a human, the robot will be a generalist, able to locomote and to operate many tools. Thought needs to be given to the kinds of specialized tools the robot will use or deploy.
For example, a key requirement in the Japanese disaster was the need to deliver cooling water to nuclear waste storage pools. The robot's job is to scout, carry, and deploy the hose.
What may be needed is an "intelligent hose"--a hose that can anchor itself to the pool, and monitor conditions such as temperatures, rates of flow, and levels of water in the pool. The disaster robot is too valuable to stand around monitoring the hose, so the hose needs to take care of itself.
Mission control
The robot isn't a superhero--it's going to need a substantial infrastructure to take advantage of it's capabilities. It will need to be programmed with plans of the nuclear facility where it operates. It will need a "twin" robot, trying out proposed repairs in advance at a similar facility somewhere else in the world.
Experience with the Mars rovers Spirit and Opportunity should provide many insights.
If this list above is complete, then Darpa has left out some key requirements:
Communications
The first role of a robot in nuclear disasters is reconnaissance. Engineers trying to control the runaway reactors need to know what is going on, and what damage has occurred. Any attempts at repair can't proceed until the situation has been thoroughly analysed.
Even when the situation has been analysed and repairs decided, it's likely that the situation will unfold much like a space walk. When astronauts do repairs or construction outside the International Space Station, every step is rehearsed. Everything is followed by ground controllers in real time. All this requires high bandwidth. So reliable communications are key.
Yet in a disaster zone, communications will be difficult. Shards of metal, reflecting or absorbing radio waves, will be everywhere. Reactors have heavy shielding; the necessary repairs may even take place deep underground.
The most obvious solution is for the robot to carry and set up it's own communication relay stations. Hence compatibility with these stations must be a design requirement.
Reconnaissance
The robot will encounter many obstacles. Controllers will need the help of smaller robotic "scouts" to plan the route through rubble. Flying scouts would have obvious advantages, but crawlers would be useful in confined or dark locations. Some scouts would need to provide their own illumination. The information obtained by scouts needs to be integrated--at a control center--with plans for the buildings being scouted.
Recharging the robot's batteries
To be effective, the robot will have to operate power tools. It can carry more specialized tools if the robot supplies power to the tools. So the robot will use a lot of power. It will need to be able to change its main batteries by itself, while operating on backup batteries.
If access to a damaged reactor is difficult, the robot can't be running home every hour to recharge it's batteries. Once the repair task is identified, the robot will need to set up recharging stations, fed by generators or power cables, as close as possible to the area of repairs.
Specialized tools
Like a human, the robot will be a generalist, able to locomote and to operate many tools. Thought needs to be given to the kinds of specialized tools the robot will use or deploy.
For example, a key requirement in the Japanese disaster was the need to deliver cooling water to nuclear waste storage pools. The robot's job is to scout, carry, and deploy the hose.
What may be needed is an "intelligent hose"--a hose that can anchor itself to the pool, and monitor conditions such as temperatures, rates of flow, and levels of water in the pool. The disaster robot is too valuable to stand around monitoring the hose, so the hose needs to take care of itself.
Mission control
The robot isn't a superhero--it's going to need a substantial infrastructure to take advantage of it's capabilities. It will need to be programmed with plans of the nuclear facility where it operates. It will need a "twin" robot, trying out proposed repairs in advance at a similar facility somewhere else in the world.
Experience with the Mars rovers Spirit and Opportunity should provide many insights.
Competition announced to build a robot for disaster zones
"The Pentagon’s research and development agency is to announce a competition on Tuesday to design specialized robots that can work in disaster zones while operating common tools and vehicles. And while such tasks may well inspire humanoid designs, roboticists say they may also lead to the robotic equivalent of the Minotaur — a hybrid creature that might have multiple arms and not just legs but treads. Rumors of the challenge have already set professional and amateur robot builders buzzing with speculation about possible designs and alliances. Aaron Edsinger, a founder of Meka Robotics in San Francisco, said he was speaking with fellow roboticists around the country and was considering a wide array of possible inspirations. " From a New York Times article by John Markoff, 4/9/12.
Thursday, March 17, 2011
An X-Prize for robots for Japanese nuclear crisis
.
 The central problem of the Japanese nuclear disaster is becoming clear: Besides at least three reactors in danger of melting down, there are at least four pools containing spent fuel that must be cooled by adding more water.
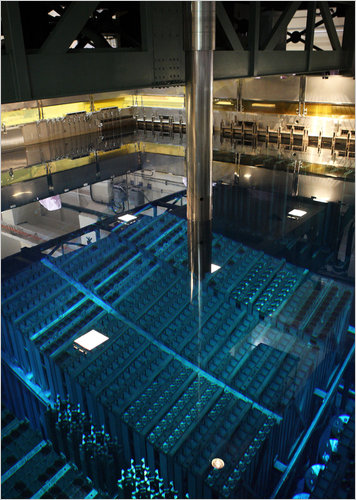
The central problem of the Japanese nuclear disaster is becoming clear: Besides at least three reactors in danger of melting down, there are at least four pools containing spent fuel that must be cooled by adding more water.These pools are the most dangerous parts of the crisis, since they have no containment structures. Water must be added, despite the fact that these pools are surrounded by wreckage, and the fact that radiation levels are rising to the point that soon no workers will be able to work without receiving lethal doses of radiation.
Storage pool for spent fuel at the Japanese reactor.
Tomohiru Ohsumi/Bloomberg News
Tomohiru Ohsumi/Bloomberg News
Since this crisis is beyond anything predicted, Japanese (and indeed world institutions) seem incapable of dealing with it. We need to empower creative people outside the normal channels to help, as happened during previous disasters. In the aftermath of Hurricane Katrina, recovery efforts were paralyzed by lack of communications. One private individual with knowledge of the Internet went in and set up satellite links and internet hubs, enabling many Internet connections in the rural areas. When Chilean miners were trapped, an American engineer volunteered his innovative drill, which succeeded in rescuing the miners.
Here is a plan for how to enable such creative, unorthodox responses. It must be focused on robots--to be our eyes and hands in places where humans are unable to go. This recipe is very rough and must be refined, but it’s a start. We should focus on 5 tasks:
Here is a plan for how to enable such creative, unorthodox responses. It must be focused on robots--to be our eyes and hands in places where humans are unable to go. This recipe is very rough and must be refined, but it’s a start. We should focus on 5 tasks:
- A robot which can climb stairs, clear small items of debris in its path, and do manual tasks. This robot would insert the hose into the pool and do similar tasks.
- A small semi-autonomous helicopter or airplane which can fly into the buildings, to relay back images showing a pool’s status, and to scout a route to the pool.
- A mobile power station which can recharge the batteries of robot #1.
- A mobile relay station (mobile in sense it might be lowered by a helicopter onto a roof) which can relay the data streams (from the other robots inside) to outside receivers.
- An “intelligent hose” which can regulate its own flow, find anchor points, and send back video of whether it’s filling the pool. This hose would be attached at the other end to water sources by Robot #1.
- Some organization--Google, the X-Prize organization or Nobel Committee, announces a high-stakes prize for the winner of a competition to develop each of the robots above. The prize is tripled if the robot is developed within a one- or two- month period.
- A panel of nuclear and robotics experts is assembled to advise the prize organization, help it set rules for the competition, and advise competitors.
- A donor for the prize steps forward, or is found.
- The military and other national organizations provide all necessary support to the winner, or to contestants considered as potential winners. For example, the winning robots are flown to Japan on air force transports.
Another benefit of this approach--the world would follow the development and use of the robots as if it were a moon landing, rather than feeling helpless and defeated.
Subscribe to:
Comments (Atom)